A driverless car (also autonomous/autopilot/auto-drive car) refers to a car that does not need human intervention to function.
The first driverless car achieved a maximum speed of 20 miles-per-hour and was built by Tsukuba Mechanical Engineering Laboratory in 1977. The Mercedes Benz robot van built during the 1980s achieved a full speed of 60 miles-per-hour using vision guidance. Subsequent projects like VaMP, the S-Class Mercedes-Benz, Demo I, II and III of DARPA and VITA-2 were able to achieve higher speeds and accuracy using saccadic computer vision, transputers and other advanced systems.
Driverless Car Basic Sub-Systems
Although there are different designs for driverless cars today, the existing systems can be broken down into four basic sub-systems.
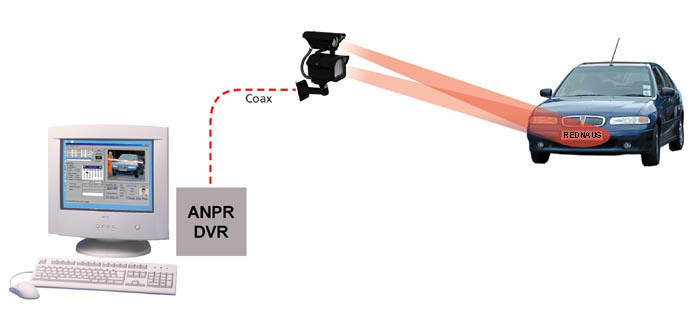
The first are sensors that give the car the ability to detect obstacles and its surroundings. There's also a navigation system that tells the car where it is relative to its destination. The motion planning subsystem guides the car in its second-to-second movement so that it can abide by traffic rules and avoid collisions. The control system translates decisions into actions.
Approaches to Driverless Transportation Systems
Fully Autonomous Systems: Fully autonomous systems aim to fully equip the cars of the future with the ability to safely navigate unfamiliar environments and transport people, products, etc. from place to place safely. No such fully functional system exists today. Projects in this approach include free-ranging military vehicles such as those presented in the DARPA Grand Challenge using laser, radar and visual technologies; ELROB or the European Land Robot Trial; the Automated Border Patrol Projects of US and Israel; and the Italian ARGO project.
Pre-Built Infrastructure: This approach makes use of existing technologies to enable driverless car transportation in defined areas like a campus or airport. The implementation of this method is entirely possible today but the cost of equipment and infrastructure is prohibitive.
Suggestions include dual-mode transit via monorail with cars having the ability to dock to a public monorail system and automated magnet-equipped highway systems capable of making the vehicles stay at the center of the lane (with entrance and exit points at various locations). Another notable project in this area is the FROG or Free Ranging On Grid project of Netherlands that combines the use of a central system with autonomous vehicles using lasers, ultrasonic sensors and odometry via magnets. This system is currently being used for small-scale applications such as factory sites and container ports.
Driver Assistance: Driver assistance technologies on the other hand make use of small steps in achieving a fully automated driverless vehicle. Instead of attempting to solve the problem in one big step, gadgets that solve small and specific problems in driving such as parking, reverse driving, etc are gradually introduced.
This approach can be further subdivided into three areas which includes sensorial informative systems (rear view alarms, lane departure warning systems, night vision, radar, etc.), actuation corrective systems (electronic stability control systems, traction controls, dynamic steering response and anti lock braking systems) and systemic systems (automated parking, enhanced/adaptive cruise control, etc.).


Follow Us!